
IEEE RoboSoft 2026. Competizione internazionale di Grasping robotico a Kanazawa
30 aprile 2026
Il team Poliba del “RoboPhysics Laboratory”, ha vinto il primo premio in Giappone alla “RoboSoft Grasping Competition 2026”.
La competizione si è svolta dall’8 al 9 aprile 2026 a Kanazawa, capitale culturale sulla costa occidentale del Giappone, durante la Conferenza Internazionale IEEE sulla Robotica Soft (IEEE RoboSoft 2026).
La competizione ha visto la partecipazione di diversi team internazionali dediti alla robotica. Tra questi, oltre al Poliba, le agguerrite squadre dell’università JAIST (Japan Advanced Institute of Science and Technology), della Southern University of Science and Technology (Shenzhen, Cina), e dell’Università Tecnológico de Monterrey (Messico).
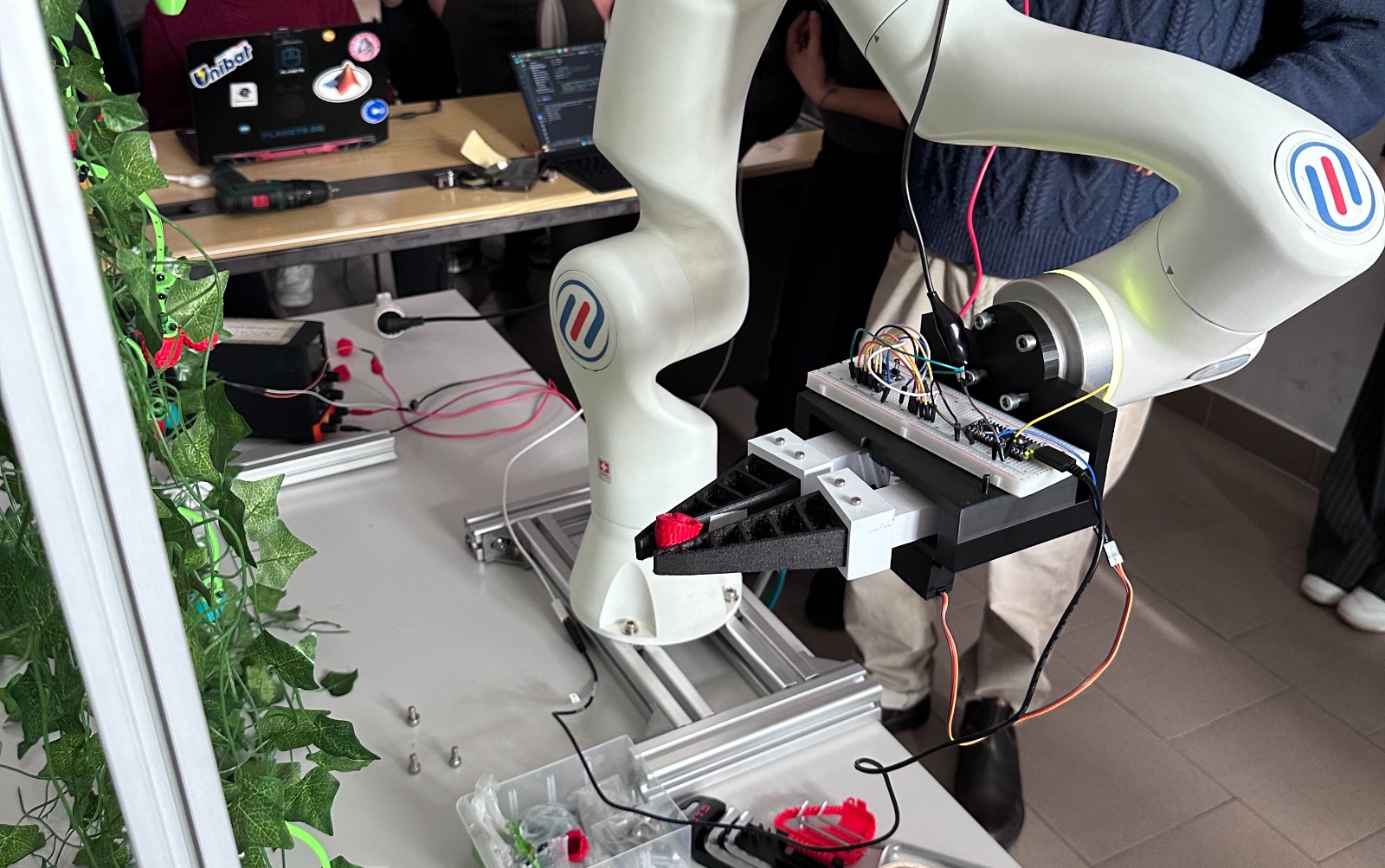
Il progetto. La sfida ha richiesto la progettazione ad hoc di un gripper robotico (pinza speciale), capace di raccogliere lamponi artificiali con caratteristiche di morbidezza e fragilità dei lamponi reali, attraverso il controllo e dosaggio della giusta forza necessaria per il distacco del frutto dalla pianta e il deposito ordinato in un cestino senza danneggiarlo.



Gli studenti vincitori. Frutto del programma d’anno del percorso di studio del corso di “Mechatronics”, proseguito come attività di tesi (docente della materia, prof. Vito Cacucciolo), tre studenti Poliba del corso di laurea magistrale in “Mechanical Engineering”. Ciò ha consentito la composizione del team Poliba così formato: Elisabetta Annese e Luca Mitaritonna di Molfetta (Ba), Giuseppe Macchia di Palo del Colle (Ba), studenti; ing. Angelo Catalano, coordinatore-tutor, dottorando presso il RoboPhysics Laboratory, prof. Vito Cacucciolo, supervisore, responsabile scientifico del Laboratorio Poliba di robotica.

La gara. Il team del RoboPhysics Laboratory ha presentato un organo di presa soft che ha utilizzato un meccanismo che ha adattato autonomamente la forza e la forma alla presa dell’oggetto grazie alla sua particolare struttura e all’utilizzo di materiali flessibili. Tale gripper ha permesso di combinare capacità di ottenere una presa salda e delicatezza necessaria per maneggiare oggetti delicati come i lamponi senza danneggiarli. Inoltre, il team, ha ottimizzato la geometria e i materiali del gripper per massimizzare le performance di raccolta. Vincente si è rilevata l’ideazione di un sistema di posizionamento innovativo ibrido che riconoscendo automaticamente i lamponi sfruttando il loro colore rosso, ha permesso ad uno degli studenti del team, tramite un joypad da videogame, la regolazione di precisione per garantire la complessa posizione di grasping richiesta per la presa del lampone.
La prova. Ogni squadra ha avuto a disposizione 10 minuti per raccogliere quanti più lamponi maturi possibili. Il punteggio è stato ridotto nel caso in cui i lamponi o le piante artificiali venissero danneggiate durante la raccolta, oppure nel caso in cui la raccolta del singolo lampone richiedesse più di un tentativo, o ancora nel caso in cui si fosse raccolto erroneamente un lampone non maturo (di colore verde).

Il risultato. Il team del Politecnico di Bari ha ottenuto il punteggio più alto della gara, 238 su 264 punti disponibili. Viva soddisfazione è stata espressa dall’intero gruppo partecipante per il risultato ottenuto. Non sono mancati i complimenti del rettore, Umberto Fratino.
Il gruppo Poliba è stato sponsorizzato dall’azienda Omnigrasp, spin-off del Politecnico, fornitrice del braccio robotico. Supporto tecnico: ingg. Antonio Camposeo e Fabio Gargano. Co-tutor del dottorando Poliba, Angelo Catalano: prof. Mariagrazia Dotoli, prof. Raffaele Carli.